|
|
| RTAM4 (Stepper &stepper) |
| |
|
| RTAM4 (double &x, double &xd, Stepper &stepper) |
| |
|
RTAM4 * | factory (double &x, double &xd) |
| |
|
void | propagate () |
| |
|
void | updateClock () |
| |
|
| StateStepper (double &x, double &xd, Stepper &stepper) |
| |
|
virtual double | optimalTimeStep () |
| |
|
| State (double &x, double &xd) |
| |
|
virtual bool | adaptive () |
| |
|
virtual bool | adaptiveFSAL () |
| |
|
| Stepper (double &EPS, double &dtp, double &dt, double &t, double &t1, size_t &kpass, bool &integrator_initialized) |
| |
|
|
std::unique_ptr< RK4 > | initializer |
| |
|
unsigned | init_step = 0 |
| |
|
double | xd0 |
| |
|
double | xd_1 |
| |
|
double | xd_2 |
| |
|
double | xd_3 |
| |
|
double | x0 |
| |
|
double & | x |
| |
|
double & | xd |
| |
|
double | tolerance |
| |
|
double & | EPS |
| |
|
double & | dtp |
| |
|
double & | dt |
| |
|
double & | t |
| |
|
double & | t1 |
| |
|
size_t & | kpass |
| |
|
bool & | integrator_initialized |
| |
The documentation for this class was generated from the following file:
- C:/Users/sberry/Desktop/Ascent/ascent/ascent/integrators/RTAM4.h
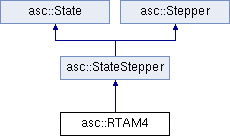
 Public Member Functions inherited from asc::StateStepper
Public Member Functions inherited from asc::StateStepper 1.8.11
1.8.11 
