System.h
#pragma once
#include "Damper.h"
#include "Spring.h"
class System : public asc::Module
{
public:
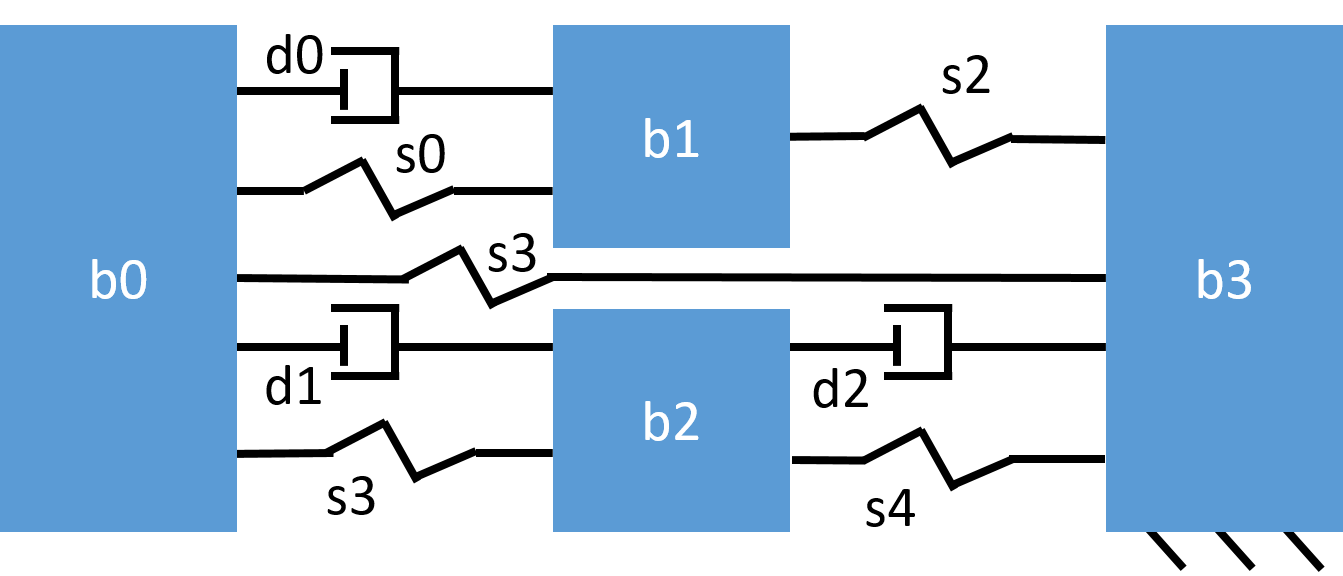
asc::Link<Body> b0{ sim }, b1{ sim }, b2{ sim }, b3{ sim };
asc::Link<Damper> d0{ sim, b0, b1 }, d1{ sim, b0, b2 }, d2{ sim, b2, b3 };
asc::Link<Spring> s0{ sim, b0, b1 }, s1{ sim, b1, b3 }, s2{ sim, b0, b3 }, s3{ sim, b1, b2 }, s4{ sim, b2, b3 };
System(size_t sim);
};
System.cpp
#include "System.h"
System::System(size_t sim) : asc::Module(sim)
{
// Set masses
b0->m = 0.3;
b1->m = 1.0;
b2->m = 0.5;
// b3 is fixed, leave its mass as 0.0
// Set damping constants
d0->c = 0.7;
d1->c = 0.4;
d2->c = 0.3;
// Set spring constants
s0->k = 100.0;
s1->k = 200.0;
s2->k = 50.0;
s3->k = 125.0;
s4->k = 225.0;
}
Initializing and Running:
Main.cpp
#include "System.h"
int main()
{
asc::Link<System> system(0);
system.name("system");
system->b0->v = 1.0; // Initial condition to get everything moving.
system->track("t");
system->track(system->b0, "s");
system->track(system->b1, "s");
system->track(system->b2, "s");
system->track(system->b3, "s");
system->run(0.01, 2.0);
system->outputTrack();
return 0;
}
Plotted Results: